



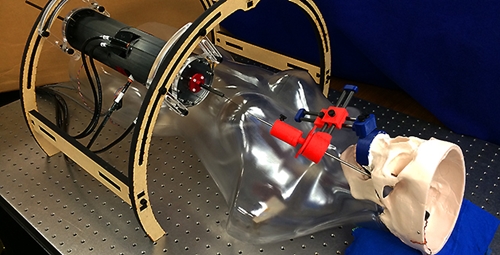
Mockup of surgical robot designed to treat epilepsy (Vanderbilt University)
16 October 2014. Engineers at Vanderbilt University in Nashville are building a robot for epilepsy surgery guided by MRI scans and designed to be less invasive than current surgical methods. The team from Vanderbilt, with colleagues from Georgia Tech and Milwaukee School of Engineering, are demonstrating a prototype of the device this week at the Fluid Power Innovation and Research Conference in Nashville.
The project, from the lab of engineering professor Eric Barth, aims to provide a more precise surgical treatment for severe cases of epilepsy that now involve a risky procedure drilling a hole into the skull and going deep into the brain. Epilepsy is a neurological condition where nerve cell signals in the brain are disturbed, causing seizures that can range from blank stares to uncontrolled convulsions and loss of consciousness. The disorder can arise from genetic causes, as well as strokes — the leading cause of epilepsy for people over the age of 35 — and head trauma.
Surgery is a treatment option for difficult-to-control cases, and when the area of the brain causing the seizures is well defined and not interfering with vital functions. More complex types of surgery may be needed when the part of the brain causing seizures can’t be removed, and multiple incisions in the brain are needed to keep the disorder from spreading. Because a part of the brain often involved with epilepsy is the hippocampus, located in the temporal lobe at the base of the brain, surgeons must probe deep into the brain to get access to it.
The Vanderbilt device, designed with neurologists at the university, aims to make the surgery less invasive, by accessing the hippocampus through the cheek, rather than the skull, sharply reducing the distance to the target. Incisions are made with a small (1.14 millimeter), curved needle and guided by MRI scans. A curved needle is required since a straight needle cannot reach the target region.
The device is configured to work inside an MRI scanner, with the needle made of a nickel-titanium alloy that can operate in an MRI. The needle fits into a series of nested tubes, and can change shape and be steered through the brain, one millimeter at a time, powered by compressed air. An electrode in the device activates a radio-frequency signal for removing the targeted brain cells.
David Comber, a Vanderbilt graduate student who performed much of the design work and one the demonstrators at this week’s conference, says tests on models in the lab show the needle’s accuracy is within 1.18 millimeters, considered sufficient for this kind of surgery. Barth says the next step in the device’s development is testing with cadavers.
A continuing concern with medical advances is the cost of new therapies. The team developing the robotic device says it is designed to be built with three-dimensional printing, to keep its costs under control. Among the team members are experts in additive manufacturing, an industrial form of 3-D printing, at Milwaukee School of Engineering.
Read more:
- Mind-Controlled Prosthetic Arm Given Long-Term Test
- Robotic Device Provides Extra Fingers to Enhance Human Grip
- FDA Approves Motorized Exoskeleton for Spinal Cord Injury
- Computer Learning Process Developed for Robotic Arm Movement
- Prototype Robotic Brain Blood-Clot Surgery Device Developed
* * *
 RSS - Posts
RSS - Posts
You must be logged in to post a comment.