



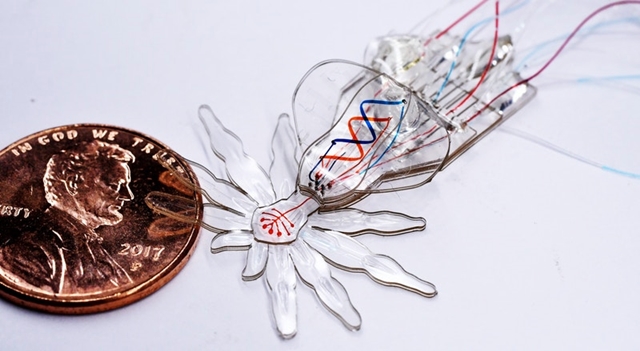
Morph device (Wyss Institute, Harvard University)
6 August 2018. Tiny robots resembling spiders, barely larger than a U.S. penny, are being designed with soft materials and microscale channels to aid in medical diagnostics and surgery in small, confined spaces. The devices, developed by faculty at Harvard University’s Wyss Institute for Biologically Inspired Engineering and Boston University, are described in today’s issue of the journal Advanced Materials (paid subscription required).
The team from the Harvard Microrobotics Laboratory led by engineering professor Robert Wood aims to reduce the scale of soft robotic devices for medical tasks such as microsurgery, but also build in more functions and capabilities like those found on larger and more rigid robots. The devices known as Microfluidic origami for reconfigurable pneumatic/hydraulic, or Morph, are built to resemble tiny peacock spiders, but the technology can also serve as a platform for designing and building robotic devices for other specialized tasks.
The Morph devices are made from soft silicone rubber, laser-cut and printed in 12 layers. Built into the layers are microscale channels allowing for fluid or air pressure to fold the layers in predetermined patterns based on origami, the Japanese art of paper folding. As reported in Science & Enterprise in November 2017, Wood’s lab designed artificial muscles for robotics, also incorporating microfluidic channels and based on origami principles. These microscale channels and folding capabilities in turn allow for the layers to fold as needed on demand, which then can be set in place with curable resins applied from outside.
“We can precisely control this origami-like folding process,” says former postdoctoral researcher and first author Tommaso Ranzani in a Wyss Institute statement, “by varying the thickness and relative consistency of the silicone material adjacent to the channels across different layers or by laser-cutting at different distances from the channels. During pressurization, the channels then function as actuators that induce a permanent structural change.” Ranzani, who started and led the project while in Wood’s lab, is now on the engineering faculty at Boston University.
Wood adds, “In the realm of soft robotic devices, this new fabrication approach can pave the way towards achieving similar levels of complexity and functionality on this small scale as those exhibited by their rigid counterparts. In the future, it can also help us emulate and understand structure-function relationships in small animals much better than rigid robots can.”
Morph devices are expected to be useful in microsurgery or with endoscopes, flexible devices for looking deep into the body, such as the gastrointestinal tract, taking tissue samples for biopsies, and sometimes performing surgical procedures. The following video tells more about and demonstrates Morph devices.
More from Science & Enterprise:
- Tissue-Engineered Heart Chamber Model Developed
- Smart Bandage Monitors, Provides Drugs to Chronic Wounds
- Electrodes for Implants 3-D Printed on Soft Materials
- Graphene Circuits Enhanced to Monitor, Image Brain Signals
- Regenerative Dressing Designed for Diabetic Wounds
* * *
 RSS - Posts
RSS - Posts
[…] Tiny Soft Robots Designed for Surgery, Diagnostics […]
[…] Tiny Soft Robots Designed for Surgery, Diagnostics […]